Imagine you are walking through your school with your eyes closed. You might take a few steps, but pretty quickly you would run into a wall, a desk, or maybe someone's backpack. To move safely, you need clues about where you are.
Robots have the same problem. A robot does not automatically know where it is. It has to figure that out using sensors, cameras, wheels, maps, and math. The basic idea is simple: a robot collects clues from the world around it, then uses those clues to make its best guess about where it is and where it should go next.
Robots Need Senses Too
Humans use senses like sight, hearing, touch, and balance. Robots use sensors, tools that help a robot notice something about the world. Some detect distance. Others see objects, measure speed, or figure out direction.
- Cameras: to see walls, roads, people, signs, or obstacles
- Wheels: to measure how far the robot has traveled
- GPS: to estimate location outdoors
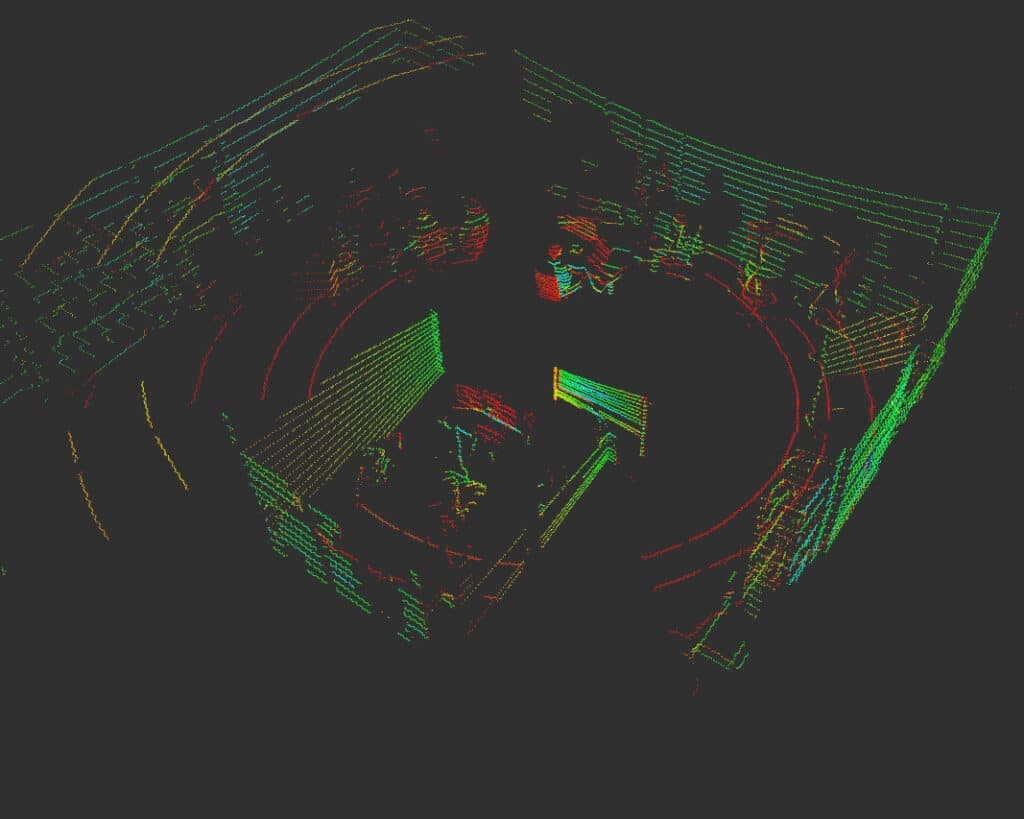
- Lidar: to scan the area with laser light
- Ultrasonic sensors: to bounce sound waves off objects
- Gyroscopes: to sense turning or tilting
Each sensor gives the robot a piece of the puzzle. A camera might show a doorway. A wheel sensor might say the robot has moved five feet. A distance sensor might detect a wall nearby. The robot combines those clues to understand its position.
Counting Wheel Turns
One simple way a robot can guess where it is is by counting how much its wheels turn. If a robot starts at the classroom door and its wheels roll forward ten feet, it can estimate that it is now ten feet from the start. This is called odometry, a little like counting your steps.
Using Cameras Like Eyes
Some robots use cameras to recognize what is around them. A robot vacuum notices furniture legs and walls. A self-driving car sees lane lines, traffic lights, and pedestrians. A Mars rover uses cameras to study rocks and avoid dangerous ground.
But a camera does not understand the world the way a human does. When you see a chair, you instantly know it is a chair. A robot sees the image as data. It has to process shapes, colors, edges, shadows, and patterns before it can decide what it is looking at. Lighting changes. Objects overlap. A chair looks different from the front, side, and back. A robot has to be trained to handle all of those possibilities.
Building a Map
Some robots make maps as they move. A robot vacuum might start in a room and slowly learn where the walls, furniture, and open spaces are. It can then use that map to clean more efficiently instead of bumping around randomly.
This is similar to what happens when you explore a new building. At first you do not know where anything is. After walking around, you start to remember: the stairs are near the entrance, the gym is down the hall, the library is around the corner. Robots build maps too, but they do it with sensors and computer programs.
Why Robots Still Get Lost
Even smart robots can get confused. A robot might get lost if its wheels slip, a sensor gives a bad reading, the room changes, furniture gets moved, the lighting goes dark, something blocks the camera, or two hallways look almost the same.
That is why robots check their location again and again. They do not make one guess and trust it forever. They keep updating their estimate as new information comes in, a lot like how you check a map, look at the signs, and look around while walking through a museum.
The Big Idea
Robots know where they are by collecting clues. They use sensors like cameras, wheels, GPS, lasers, and motion detectors, then combine those clues to estimate their location, build maps, avoid obstacles, and decide where to go next.
Keep Exploring
What Makes a Robot a Robot?About the Author
Noah Lopez
student volunteer
Noah is a student volunteer who helps run our robotics sessions and supports students building their first robot.