Imagina que caminas por tu escuela con los ojos cerrados. Quizás das unos pasos, pero muy pronto chocas con una pared, un escritorio o la mochila de alguien. Para moverte con seguridad, necesitas pistas sobre dónde estás.
Los robots tienen el mismo problema. Un robot no sabe automáticamente dónde está. Tiene que averiguarlo usando sensores, cámaras, ruedas, mapas y matemáticas. La idea básica es simple: un robot recopila pistas del mundo que lo rodea y luego las usa para hacer su mejor estimación de dónde está y hacia dónde debe ir.
Los Robots También Necesitan Sentidos
Los humanos usamos sentidos como la vista, el oído, el tacto y el equilibrio. Los robots usan sensores, herramientas que ayudan a un robot a notar algo sobre el mundo. Algunos detectan distancias. Otros ven objetos, miden velocidad o calculan dirección.
- Cámaras: para ver paredes, caminos, personas, señales u obstáculos
- Ruedas: para medir cuánto ha viajado el robot
- GPS: para estimar la ubicación en exteriores
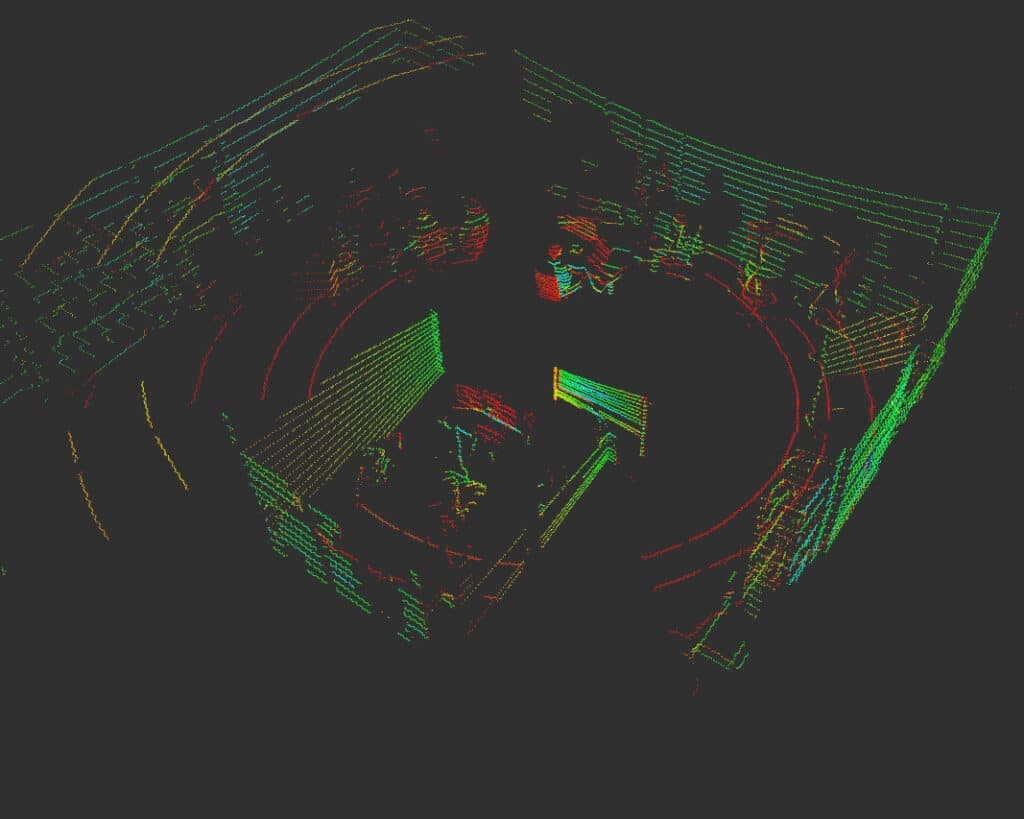
- Lidar: para escanear el área con luz láser
- Sensores ultrasónicos: para rebotar ondas de sonido en los objetos
- Giroscopios: para detectar giros o inclinaciones
Cada sensor le da al robot una pieza del rompecabezas. Una cámara puede mostrar una puerta. Un sensor de ruedas puede decir que el robot avanzó un metro y medio. Un sensor de distancia puede detectar una pared cercana. El robot combina esas pistas para entender su posición.
Contar los Giros de las Ruedas
Una forma sencilla en que un robot puede estimar su posición es contando cuánto giran sus ruedas. Si un robot empieza en la puerta del salón y sus ruedas avanzan tres metros, puede estimar que ahora está a tres metros del inicio. Esto se llama odometría, algo así como contar tus pasos.
Usar Cámaras Como Ojos
Algunos robots usan cámaras para reconocer lo que está a su alrededor. Una aspiradora robótica nota las patas de los muebles y las paredes. Un auto autónomo ve las líneas de los carriles, los semáforos y los peatones. Un rover de Marte usa cámaras para estudiar las rocas y evitar terrenos peligrosos.
Pero una cámara no entiende el mundo como lo hace un humano. Cuando ves una silla, instantáneamente sabes que es una silla. Un robot ve la imagen como datos. Tiene que procesar formas, colores, bordes, sombras y patrones antes de poder decidir qué está mirando. La iluminación cambia. Los objetos se superponen. Una silla se ve diferente de frente, de lado y de espaldas. Un robot tiene que estar entrenado para manejar todas esas posibilidades.
Construir un Mapa
Algunos robots hacen mapas mientras se mueven. Una aspiradora robótica puede empezar en una habitación y aprender poco a poco dónde están las paredes, los muebles y los espacios abiertos. Luego puede usar ese mapa para limpiar con más eficiencia en lugar de chocar aleatoriamente.
Es similar a lo que pasa cuando exploras un edificio nuevo. Al principio no sabes dónde está nada. Después de caminar un poco, empiezas a recordar: las escaleras están cerca de la entrada, el gimnasio está al fondo del pasillo, la biblioteca está a la vuelta de la esquina. Los robots también construyen mapas, pero lo hacen con sensores y programas de computadora.
Por Qué los Robots Todavía Se Pierden
Incluso los robots inteligentes pueden confundirse. Un robot puede perderse si sus ruedas resbalan, un sensor da una lectura incorrecta, la habitación cambia, los muebles se mueven, la luz se oscurece, algo bloquea la cámara o dos pasillos se ven casi iguales.
Por eso los robots verifican su ubicación una y otra vez. No hacen una suposición y la confían para siempre. Siguen actualizando su estimación a medida que llega nueva información, muy parecido a cómo tú consultas un mapa, lees las señales y miras alrededor mientras caminas por un museo.
La Gran Idea
Los robots saben dónde están recopilando pistas. Usan sensores como cámaras, ruedas, GPS, láseres y detectores de movimiento, y luego combinan esas pistas para estimar su ubicación, construir mapas, evitar obstáculos y decidir hacia dónde ir.
Prueba Esto Después
Sigue Explorando
¿Qué Hace que un Robot Sea un Robot?Sobre el Autor
Noah Lopez
voluntario estudiante
Noah es voluntario estudiante y ayuda a dirigir las sesiones de robótica, apoyando a quienes construyen su primer robot.