想象你闭着眼睛走过学校——也许走几步,但很快就会撞上墙、桌子或某人的书包。要安全移动,你需要关于自己位置的线索。
机器人面临同样的问题。机器人不能自动知道自己在哪里,它必须用传感器、摄像头、轮子、地图和数学来弄清楚。基本思路很简单:机器人收集周围世界的线索,然后用这些线索对自己的位置做出最佳猜测,并决定下一步去哪里。
机器人也需要感官
人类有视觉、听觉、触觉和平衡感,机器人使用传感器——能帮助机器人注意世界上某些事物的工具。有些传感器检测距离,有些看到物体,有些测量速度或辨别方向。
- 摄像头:看墙、道路、人、标志或障碍物
- 轮子:测量机器人走了多远
- GPS:在户外估计位置
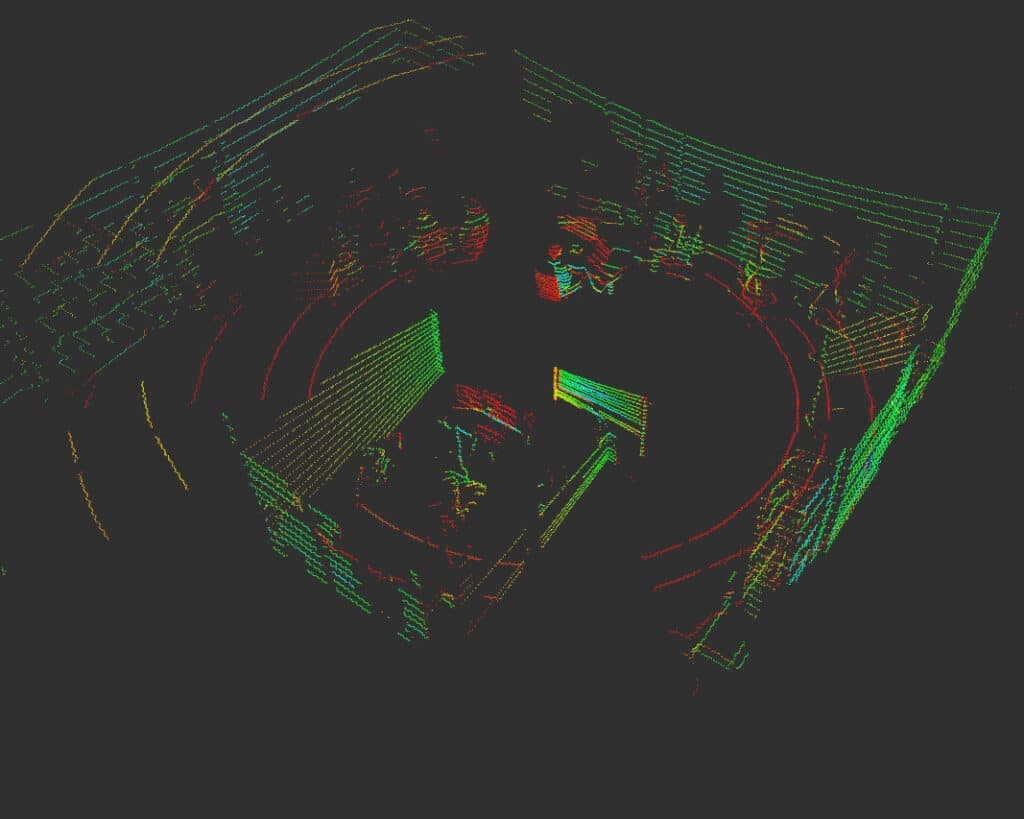
- 激光雷达:用激光光线扫描区域
- 超声波传感器:用声波弹射到物体上
- 陀螺仪:感知转动或倾斜
每个传感器给机器人一片拼图。摄像头可能看到一扇门,轮子传感器可能说机器人移动了五英尺,距离传感器可能检测到附近有墙。机器人把这些线索组合起来理解自己的位置。
数车轮转数
机器人猜测自己在哪里的一种简单方法,是计算车轮转了多少圈。如果机器人从教室门口出发,车轮向前滚了三米,它可以估计自己现在距起点三米。这叫做里程计,有点像数步数。
像眼睛一样使用摄像头
一些机器人用摄像头识别周围的事物。扫地机器人注意家具腿和墙壁,自动驾驶汽车看车道线、交通灯和行人,火星探测车用摄像头研究岩石、避开危险地面。
但摄像头不像人一样理解世界。当你看到一把椅子,你立刻知道那是椅子;机器人把图像看作数据,需要处理形状、颜色、边缘、阴影和规律才能判断看到的是什么。光线会变化,物体会重叠,椅子从正面、侧面和背面看起来不同,机器人必须经过训练来处理所有这些可能性。
建立地图
一些机器人在移动时建立地图。扫地机器人可能从一个房间出发,慢慢学习墙壁、家具和开放空间在哪里,然后用这张地图更有效率地清洁,而不是随机乱撞。
这类似于你探索一栋新楼的过程。一开始你不知道任何东西在哪里;走了一圈后,你开始记住:楼梯在入口附近,体育馆在走廊尽头,图书馆在拐角处。机器人也建立地图,只是用传感器和计算机程序来做。
为什么机器人还是会迷路
即使是聪明的机器人也可能困惑。如果车轮打滑、传感器给出错误读数、房间发生变化、家具被移动、光线变暗、东西挡住摄像头,或者两条走廊看起来几乎一样,机器人可能会迷路。
这就是为什么机器人要一遍又一遍地检查自己的位置,不会只做一次猜测然后永远相信它,而是随着新信息不断更新估计——就像你走过博物馆时查看地图、看指示牌、四处张望一样。
核心思想
机器人通过收集线索来知道自己在哪里,使用摄像头、轮子、GPS、激光和运动探测器等传感器,然后将这些线索组合起来估计位置、建立地图、避开障碍物并决定下一步去哪里。
继续探索
机器人的本质是什么?关于作者
Noah Lopez
student volunteer
Noah is a student volunteer who helps run our robotics sessions and supports students building their first robot.